Arrow modeling#
About#
Note
This example is derived from the example from geonodes, you can compare pynodes with geonodes in this example.
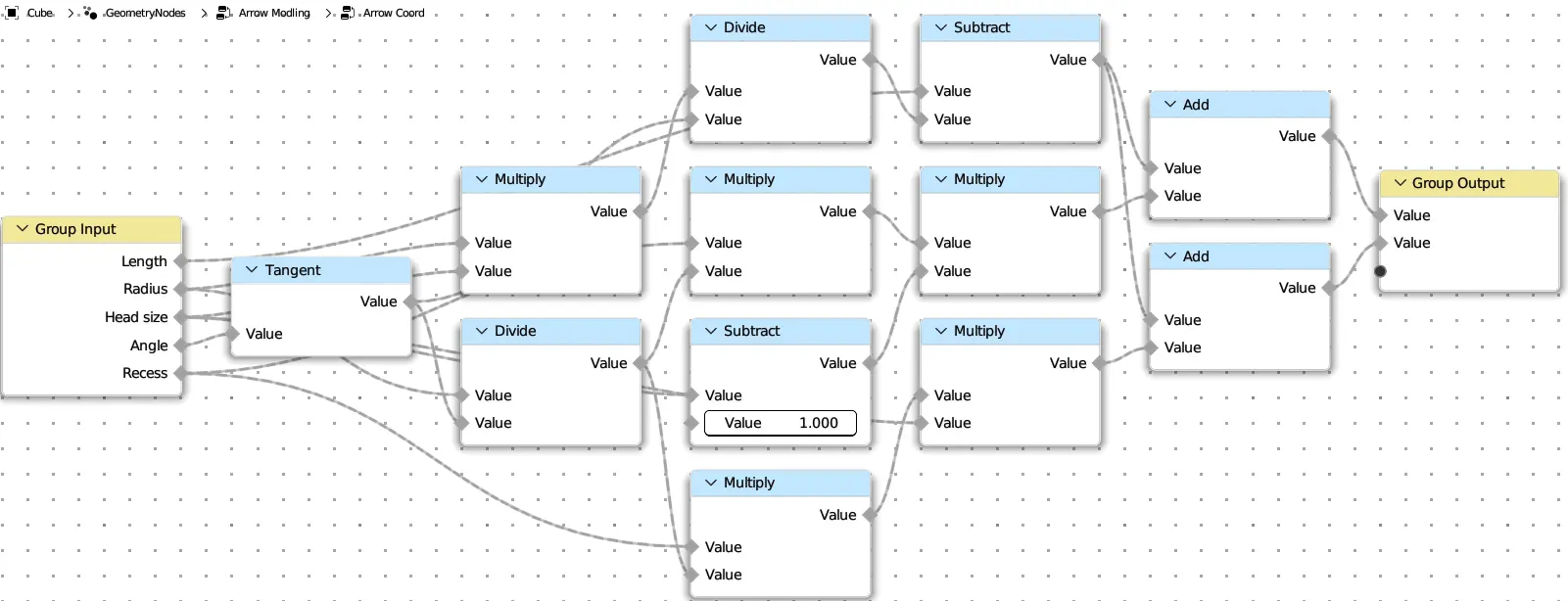
Calculate coordinate of arrow#
arrow_coord
from pynodes import *
from pynodes.math import *
@tree
def arrow_coord(
l: Float = ("Length", 1, 0),
r: Float = ("Radius", 0.1, 0.001),
s: Float = ("Head size", 2, 1.001),
α: Angle = ("Angle", radians(20), radians(10), radians(89.999)),
k: Float = ("Recess", 0.5, 0, 0.99),
):
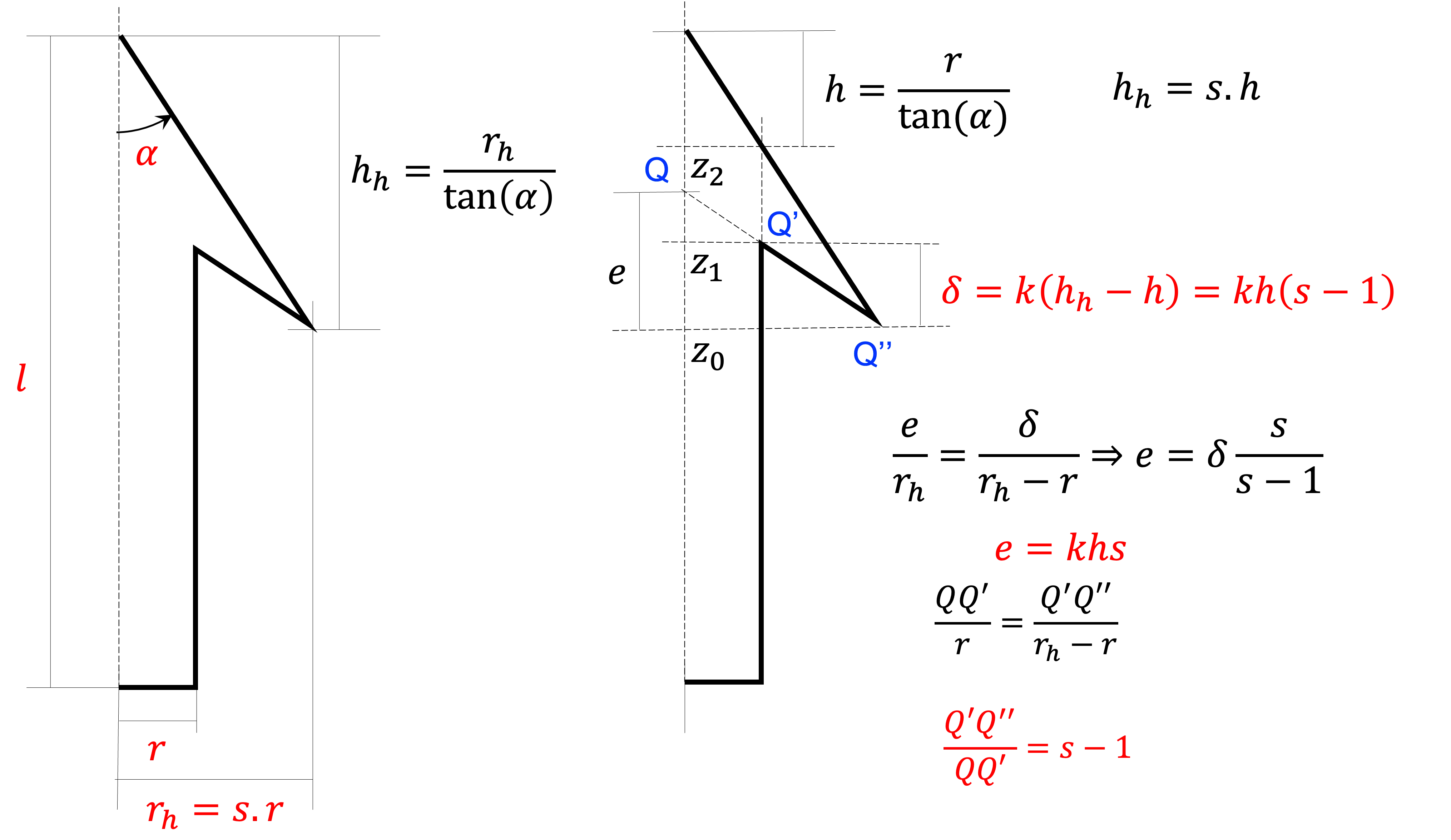
rh = r * s
tg = tan(α)
hh = rh / tg
z0 = l - hh
h = r / tg
d = k * h * (s - 1)
z1 = z0 + d
z2 = z0 + k * h * s
return z1, z2
coordinate Correction#
coord_correction

@tree
def coord_correction(vertices: Integer = (12, 3)):
f = 1 / cos(pi / vertices)**2
position = InputPosition()
corrected_pos = position * (f, f, 1)
return corrected_pos
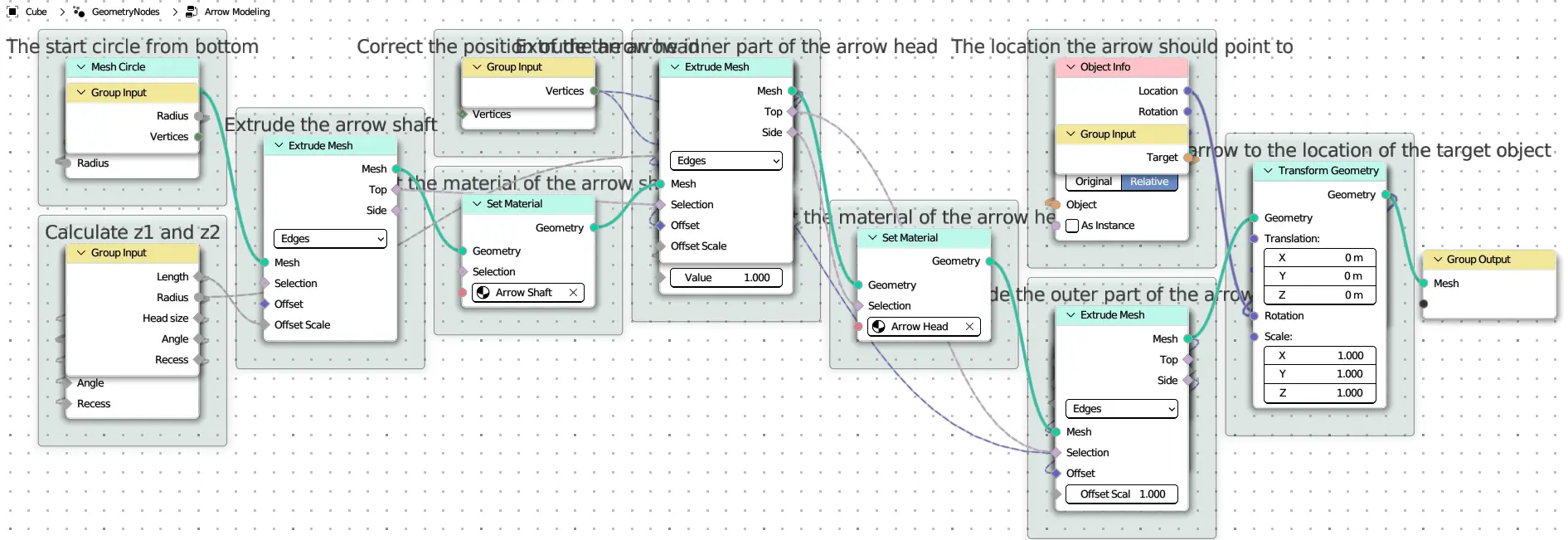
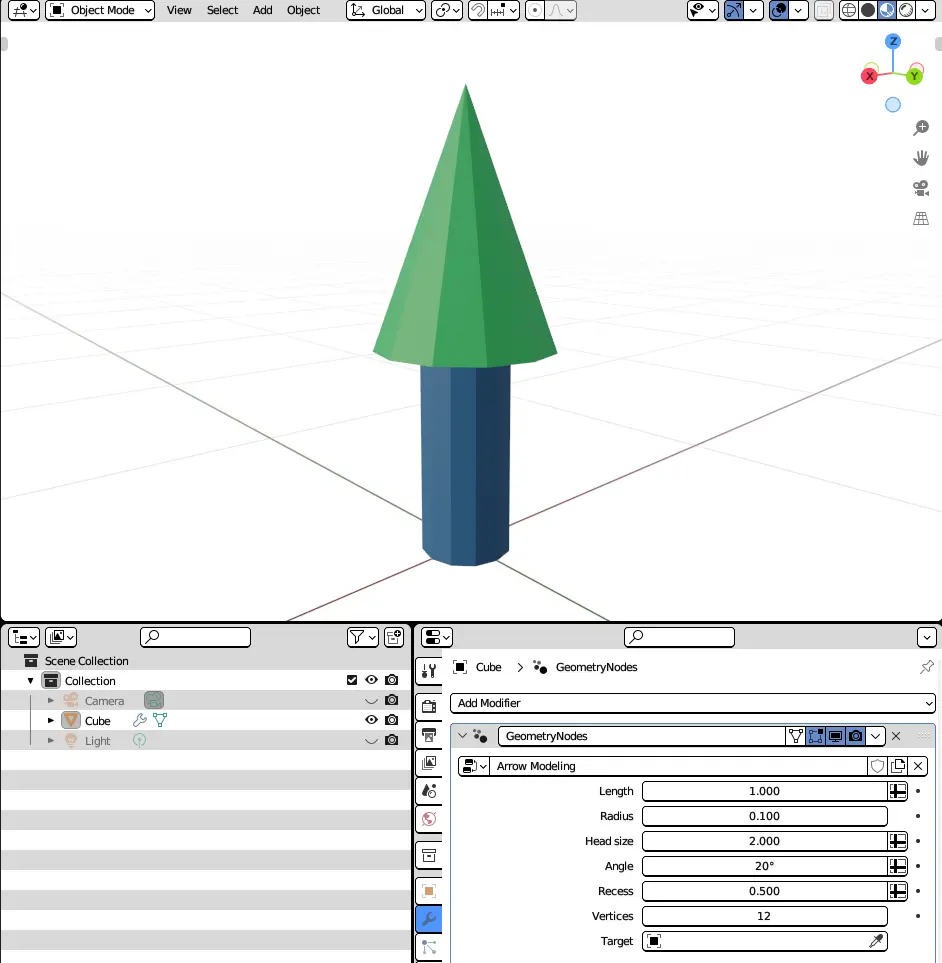
Arrow Modeling#
arrow_modeling
@tree
def arrow_modeling( # name(Optional), default, min(Optional), max(Optional)
l: Float = ("Length", 1, 0),
r: Float = ("Radius", 0.1, 0.001),
s: Float = ("Head size", 2, 1.001),
α: Angle = ("Angle", radians(20), radians(10), radians(89.999)),
k: Float = ("Recess", 0.5, 0, 0.99),
vertices: Integer = (12, 3),
target: Object = None
):
with frame("The start circle from bottom"):
arrow = MeshCircle(vertices=vertices, radius=r, fill_type='NGON')
with frame("Calculate z1 and z2"):
z1, z2 = arrow_coord(l, r, s, α, k)
with frame("Extrude the arrow shaft"):
arrow, top, sides = arrow.extrude_edges(offset_scale=z1)
with frame("Set the material of the arrow shaft"):
arrow.set_material("Arrow Shaft")
with frame("Correct the position of the arrow head"):
corrected_pos = coord_correction(vertices)
with frame("Extrude the arrow inner part of the arrow head"):
arrow, top, sides = arrow[top].extrude_edges(offset=corrected_pos - (0, 0, z2), offset_scale=s - 1)
with frame("Set the material of the arrow head"):
arrow[sides].set_material("Arrow Head")
with frame("Extrude the outer part of the arrow head"):
arrow, top, sides = arrow[top].extrude_edges(offset=(0, 0, l) - corrected_pos)
with frame("The location the arrow should point to"):
loc = target.object_info("RELATIVE").location
with frame("Rotate the arrow to the location of the target object"):
rot_track = loc.align_euler_to_vector("Z")
arrow.transform(rotation=rot_track)
return arrow
Arrow Materials#
Arrow materials
@tree
def arrow_head():
"""@material"""
shader = BsdfPrincipled(base_color="#3ac463")
return shader
@tree
def arrow_shaft():
"""@material"""
shader = BsdfPrincipled(base_color="#2c6397")
return shader